Авиационная противолодочная реактивная торпеда АПР-3 «Орёл-М».
Разработчик: НИИПГМ
Страна: Россия (СССР)
Начало разработки: 1969 г.
Принятие на вооружение: 1991 г.
Авиационная противолодочная реактивная торпеда АПР-3 «Орёл-М» предназначена для поражения современных и перспективных подводных лодок, в том числе многоцелевых атомных ракетных, при скорости хода до 40 узлов в подводном (на глубинах до 800м), перископном и надводном положениях, а также надводных кораблей в любых акваториях Мирового океана, в том числе в районах с малыми глубинами (60-150 м), при волнении моря до 6 баллов.
Разработка реактивной торпеды «Орел» с турбоводометным двигателем была начата НИИПГМ (позднее ЦНИИ «Гидроприбор» г. Санкт-Петербург, в настоящее входит в состав АО «Корпорация тактическое ракетное вооружение») в 1969 году практически параллельно с ракетой АПР-2 «Ястреб». Турбоводометный двигатель создавался в КБ завода «Сатурн» под руководством главного конструктора А.М.Люльки. Из-за сложности решения задач, поставленных перед создателями ракеты «Орел», сроки разработки неоднократно переносились. Разработка последнего варианта ракеты «Орел-М» была завершена только в 1990 году. После принятия на вооружение ракета получила обозначение АПР-3 (экспортный вариант — АПР-3Э).

Реактивная торпеда АПР-3Э.
Ракета АПР-3 применяется с противолодочных самолетов и вертолетов по данным первичного целеуказания. Она отличается от существующих авиационных противолодочных торпед и ракет высоким быстродействием в режиме поиска и обнаружения цели, высокой скоростью сближения с ней после первичного захвата и поражает противника, как правило, до начала организации им противодействия.
Ракета АПР-3 состоит из следующих основных частей, размещенных поотсечно:
— системы наведения (носовой приборный отсек, включает акустическую головку и автомат системы наведения);
— отсек боевой части (боевой заряд и предохранительно-исполнительный механизм);
— центральный приборный отсек (приборы системы управления, электропитание и др.);
— отсек двигательной установки (газогенератор с зарядом твердого топлива и турбонасосный агрегат движителя);
— кормовой приборный отсек (блоки бортовой автоматики и электрические рулевые приводы);
— отсек торможения (корпусно-механическая часть, парашютная система, устройства ввода в работу тормозной системы).

Компоновка АПР-3.
Для уменьшения влияния шумов двигателя на систему самонаведения корпус ракеты и узлы крепления акустической головки выполнены из шумопоглащающего материала.
Для предотвращения повреждения системы самонаведения при приводнении ракеты на носовую часть надевается металлический обтекатель. После приводнения ракета входит в воду под углом 15° по деференту, при этом она стабилизируется по курсу и крену. На глубине 20 м снимается предохранение взрывного устройства.
АПР-3 оснащена гидроакустической системой наведения — с использованием классификационных методов обработки информации. Сканирование пространства под водой в режиме поиска цели в бесшумных условиях производится за счет спирального движения ракеты под действием гравитации без включения двигательной установки. Реактивная двигательная установка ракеты приводится в действие только после обнаружения цели и позволяет за минимальное время (1-2 мин) достичь цели, что практически исключает возможность ее уклонения и (или) другого противодействия.
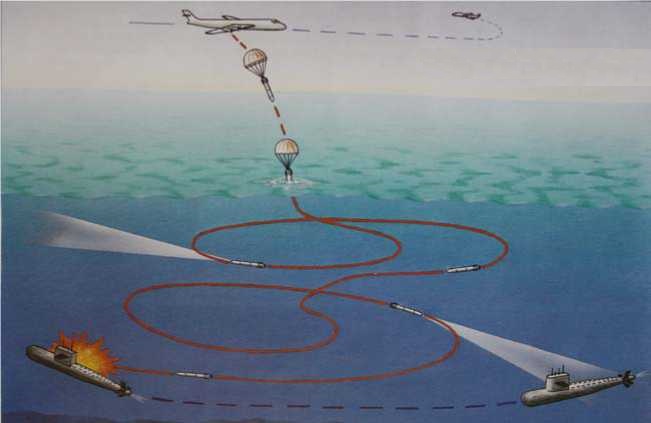
Схема применения реактивной торпеды АПР-3Э.
С этой целью в конструкции и системах ракеты реализован ряд оригинальных, прогрессивных решений и новейших достижений науки и технологий. Так, например, в многоканальной гидроакустической системе обнаружения и пеленгования (СОП) АПР-3Э впервые были применены новые пространственно-временные корреляционные методы обработки принимаемых сигналов в сочетании с использованием специальных зондирующих посылок с азимутальной частотной модуляцией. Использование подобных посылок приводит к тому, что спектр реверберации оказывается шире спектра сигналов подводной лодки — цели и это вместе с различием пространственно-корреляционных функций реверберации и ПЛ-цели позволяет надежно отстраиваться от реверберационных помех. Одновременно обеспечиваются высокая помехоустойчивость относительно ходовых помех и автоматическая защита от средств гидроакустического противодействия как заградительного, так и ретрансляционного типа. Кроме того, в алгоритме работы СОП реализованы стробирование цели по дальности, по углу в горизонтальной и вертикальной плоскостях, плавающий цикл по излучению, изменение длительности зондирующей посылки с дистанцией. Реализация этих технических решений позволила существенно повысить характеристики СОП.
В ракете впервые разработан и применен закон наведения с адаптивным углом упреждения. В процессе наведения ее на цель автоматически определяется значение вводимого угла упреждения, который при сближении с целью корректируется. Введение угла упреждения в двух плоскостях осуществляется за счет разворота оси диаграммы направленности акустической головки электронным способом. Реализация метода наведения с адаптивным углом упреждения позволила сместить центр группирования попаданий ракеты АПР-3 к центру ПЛ-цели и обеспечить попадание преимущественно в ее прочный корпус. Так если АПР-2 обеспечивала равновероятную область попадания по всей архитектуре ПЛ, то АПР-3Э не менее 50%, а АПР-3МЭ не менее 60% попаданий в наиболее уязвимую часть ПЛ (прочный корпус).
Для авиационных противолодочных ракет различных модификаций в НИИ «Поиск» было создано целое семейство контактных и неконтактных взрывателей: И-152, И-171В, И-394, И-346 с блоками Б-164Т, Б-120 и неконтактный электромагнитный датчик цели И-289 со сферической характеристикой реагирования.
В системе электропитания бортовой аппаратуры ракеты наряду с использованием ампульной батареи большой мощности впервые разработан и применен молекулярный накопитель. Это позволило в 7 раз увеличить потребление электрической энергии генератора зондирующих импульсов СОП при существенно меньшем объеме накопителя.
Разработанный для ракеты АПР-3 двухрежимный турбоводометный двигатель на смесевом высококалорийном твердом топливес регулируемой тягой не имеет аналогов в мировой и отечественной практике. Продолжительность работы двигателя — 113 с. Для уменьшения влияния структурных шумов двигателя, проникающих на акустическую головку СОП по корпусу ракеты, корпус ракеты и узлы крепления акустической головки сделаны из шумопоглощающих материалов. Это обусловило работоспособность СОП при работе турбоводометной двигательной установки.
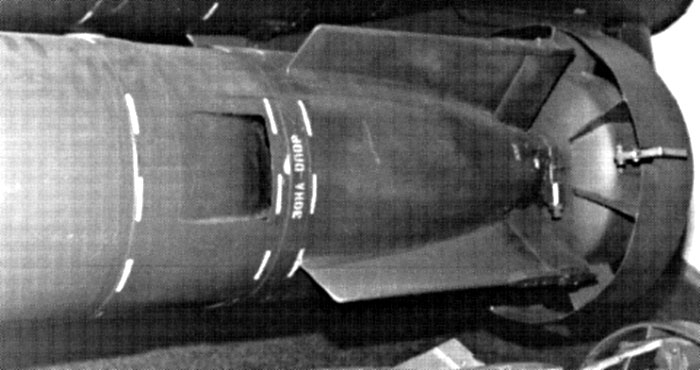
Заборники двигателя торпеды АПР-3.
ТТХ:
Калибр, мм: 350
Длина, мм: 3600-3700
Вес, кг: 500-525
БЧ: фугасная, 74-100 кг
Взрыватель: акустический неконтактный + контактный
Система электропитания: ампульная батарея большой мощности
Траектория движения: поиск по спирали
Глубина хода, м: 0-800
Скорость хода, узл
— режим 1: 65
— режим 2: 100
Глубина поражения ПЛ, м: 800
Скорость цели, км/ч: до 80
Время выполнения боевой задачи, мин: 1-2
Высота применения: с малых высот или с висения
Двигатель: регулируемый турбоводометный
Система самонаведения: многоканальная гидроакустическая СОП
Система управления: инерциальная с трехстепенным гироскопическим датчиком и системой наведения
Носитель: Ту-142М, Ил-38, Ка-27, Ка-28, Ми-14.

Сброс торпеды АПР-3Э с вертолета Ка-28 ВМС Китая.
.
.
Список источников:
Сайт АО «Корпорация тактическое ракетное вооружение». РАКЕТА АПР-3Э.
А.В.Карпенко. Подводные ракеты для противолодочной авиации.
Сайт «Уголок неба». 2004 г. страница: «АПР-3 Орел».